A quick guide to setting up and installing OpenCV for using in the Code::Blocks integrated development environment in Linux. The version of Linux I am currently using is Ubuntu 14.04. At the time of writing the version of OpenCV for Linux used is 2.4.9. (I had originally tried version 2.4.10 but had problems compiling it with the version of gcc I had (4.8.2), so I reverted to 2.4.9 instead.)
Step 1: Download and extract OpenCV for Linux
Versions of OpenCV can be downloaded from here:
http://opencv.org/downloads.html
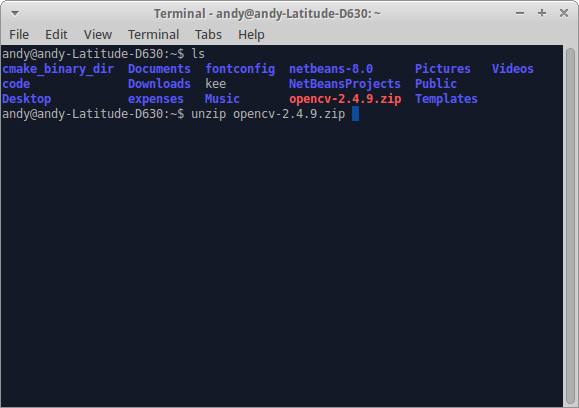
Save it to the location of your choice. Open a command prompt, navigate to the download location and unzip:
Step 2: Create an OpenCV build directory
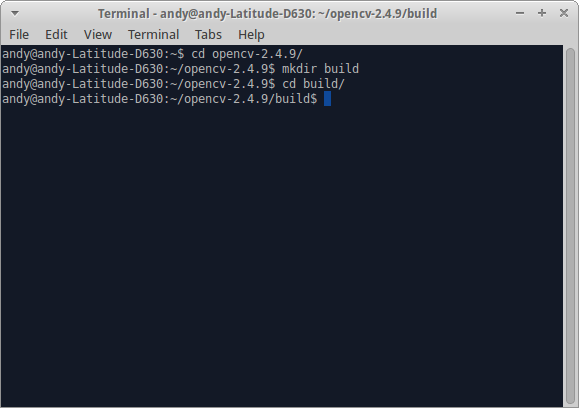
Navigate to the OpenCV directory, and use
mkdir
to create the build directory:
Step 3: Use CMake to build OpenCV
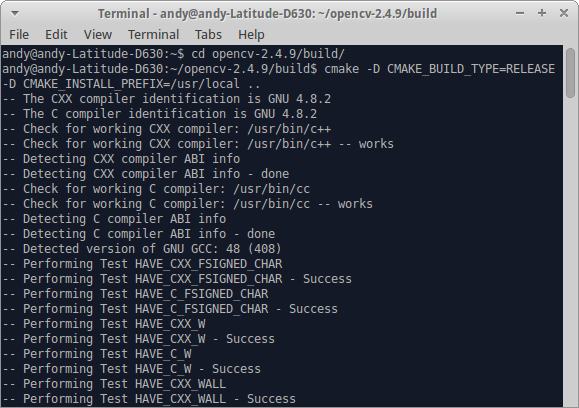
Navigate to the ‘build’ directory created and run the following CMake command:
cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local ..
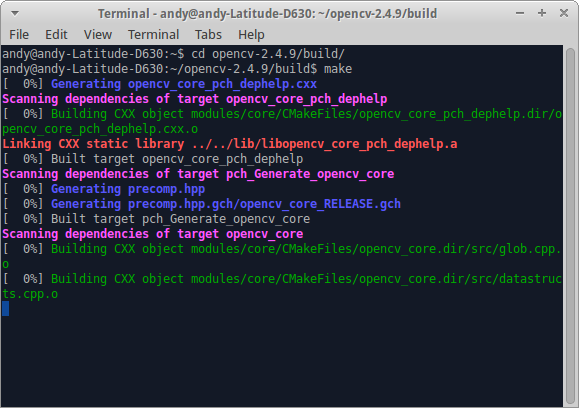
And then run
make
command, which can take a while to complete:
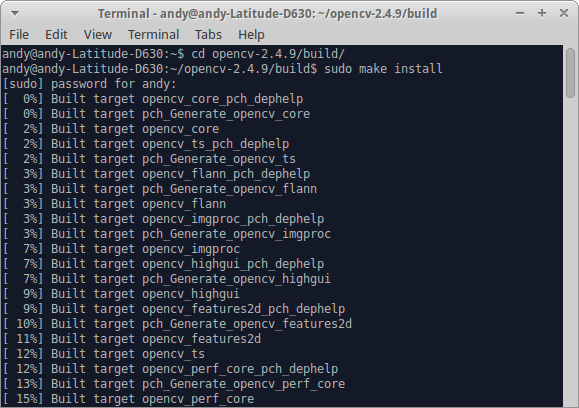
Followed by the
sudo make install
command:
Step 4: Create a Code::Blocks Project
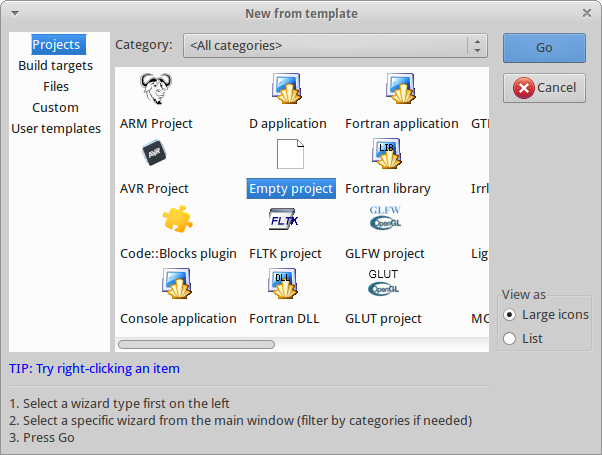
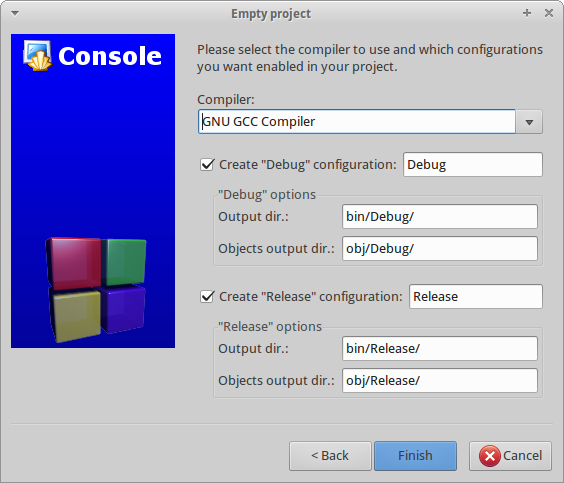
Open Code::Blocks and select File > New > Project. Select Empty Project:
Give the project a name:
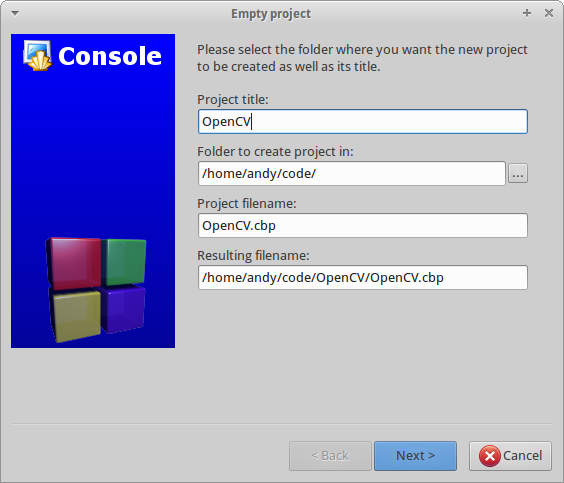
And finish with the default settings:
Once the project is created, select File > New > Empty File, to add the main.cpp file to the project. Copy and paste the following code example to main.cpp:
// DetectBlobs.cpp : Defines the entry point for the console application.
//
#include <cv.h>
#include <cxcore.h>
#include <highgui.h>
int main()
{
// Initialise
//std::string filepath = "spots.bmp";
std::string filepath = "spots2.jpg";
int num_blobs = 0;
// Load grayscale version of coloured input image
IplImage* original = cvLoadImage( filepath.c_str() );
IplImage* grayscale = cvLoadImage( filepath.c_str(),
CV_LOAD_IMAGE_GRAYSCALE );
// Check bitmap image exists
assert( grayscale );
// Create IplImage struct for a black and
// white (binary) image
IplImage* img_bw = cvCreateImage( cvGetSize( grayscale ),
IPL_DEPTH_8U,
1 );
// Use thresholding to convert grayscale image
// into binary
cvThreshold( grayscale, // source image
img_bw, // destination image
40, // threhold val.
255, // max. val
CV_THRESH_BINARY ); // binary
// Create IplImage struct for inverted black
// and white image
IplImage* img_bw_inv = cvCloneImage( img_bw );
IplImage* img_bw_cpy = cvCloneImage( img_bw );
// Find connected components using OpenCV
CvSeq* seq;
CvMemStorage* storage = cvCreateMemStorage( 0 );
cvClearMemStorage( storage );
// cvFindContours the 12 + 1 extra object for
// white backgrounds and black spots, hence
// subtract 1
num_blobs = cvFindContours( img_bw,
storage,
&seq,
sizeof( CvContour ),
CV_RETR_LIST,
CV_CHAIN_APPROX_NONE,
cvPoint( 0, 0 ) ) - 1;
// Display the input / output windows and images
cvNamedWindow( "original" );
cvShowImage( "original", original );
cvNamedWindow( "grayscale" );
cvShowImage( "grayscale", grayscale );
cvNamedWindow( "black_and_white" );
cvShowImage( "black_and_white",
img_bw_cpy );
// Wait for user key press and then tidy up
cvWaitKey(0);
cvReleaseImage( &original );
cvReleaseImage( &grayscale );
cvReleaseImage( &img_bw );
cvReleaseImage( &img_bw_inv );
cvReleaseImage( &img_bw_cpy );
cvDestroyWindow( "greyscale" );
cvDestroyWindow( "black_and_white" );
cvDestroyWindow( "inverted" );
return 0;
}
Step 5: Configure project settings
Right click the project folder and select Build Options…
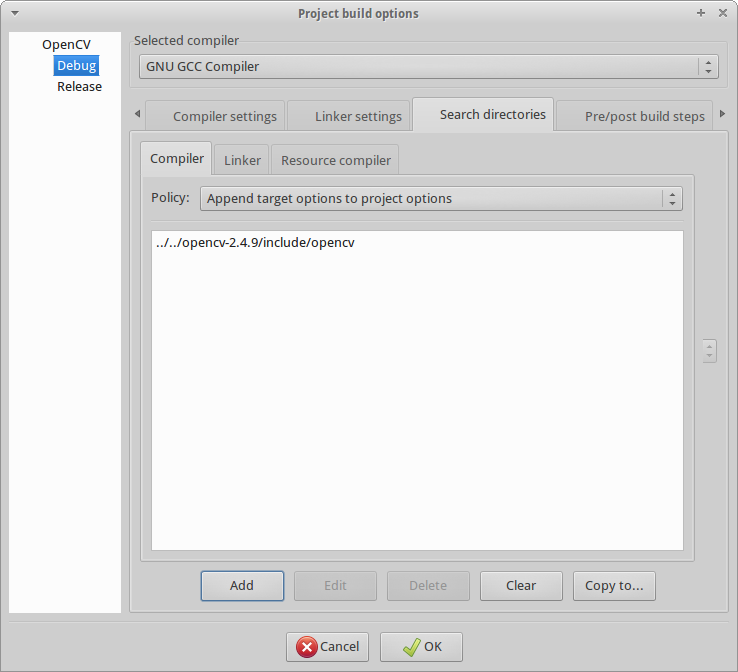
Select the Search Directories tab and then select the Compiler tab. Select the Add button in order to set the location of the include files:
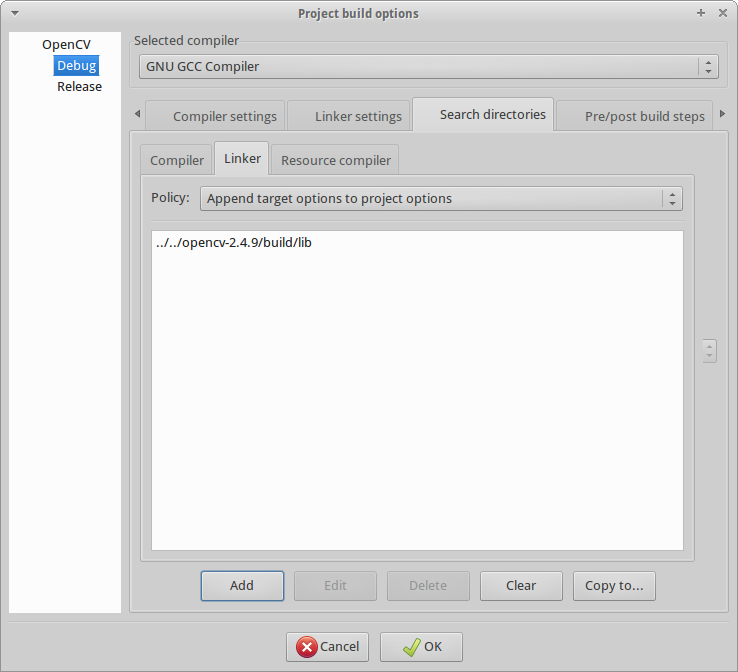
Then select the Linker tab and then Add button in order to set the location of the OpenCV libraries, in the build/lib folder that was created using CMake earlier:
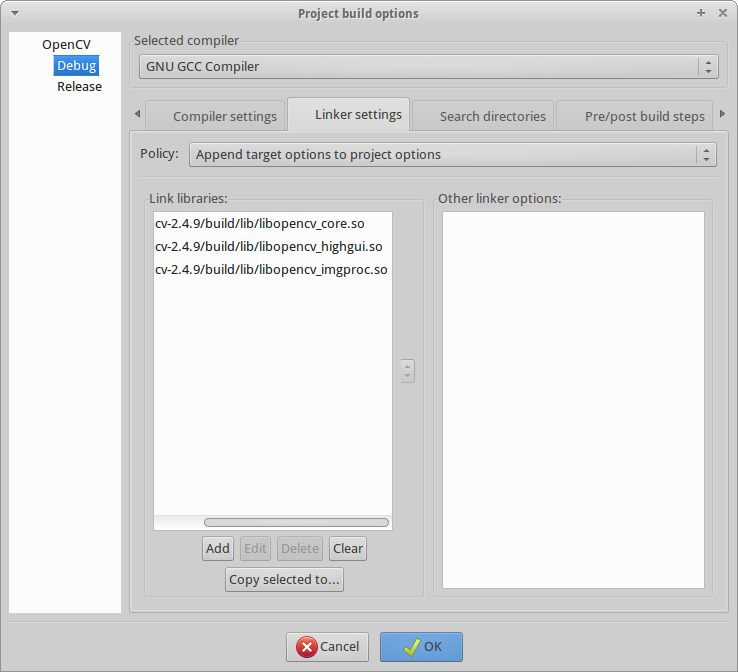
Select the Linker Settings tab and set the libraries that you will need to include, in this example these are core, highgui and imgproc:
That should be sufficient to enable the project to build correctly.
Step 6: Try it!
This is the “spots2.jpg’ image used in this test program (obviously, save the file in a place where your Code::Blocks project can find it):
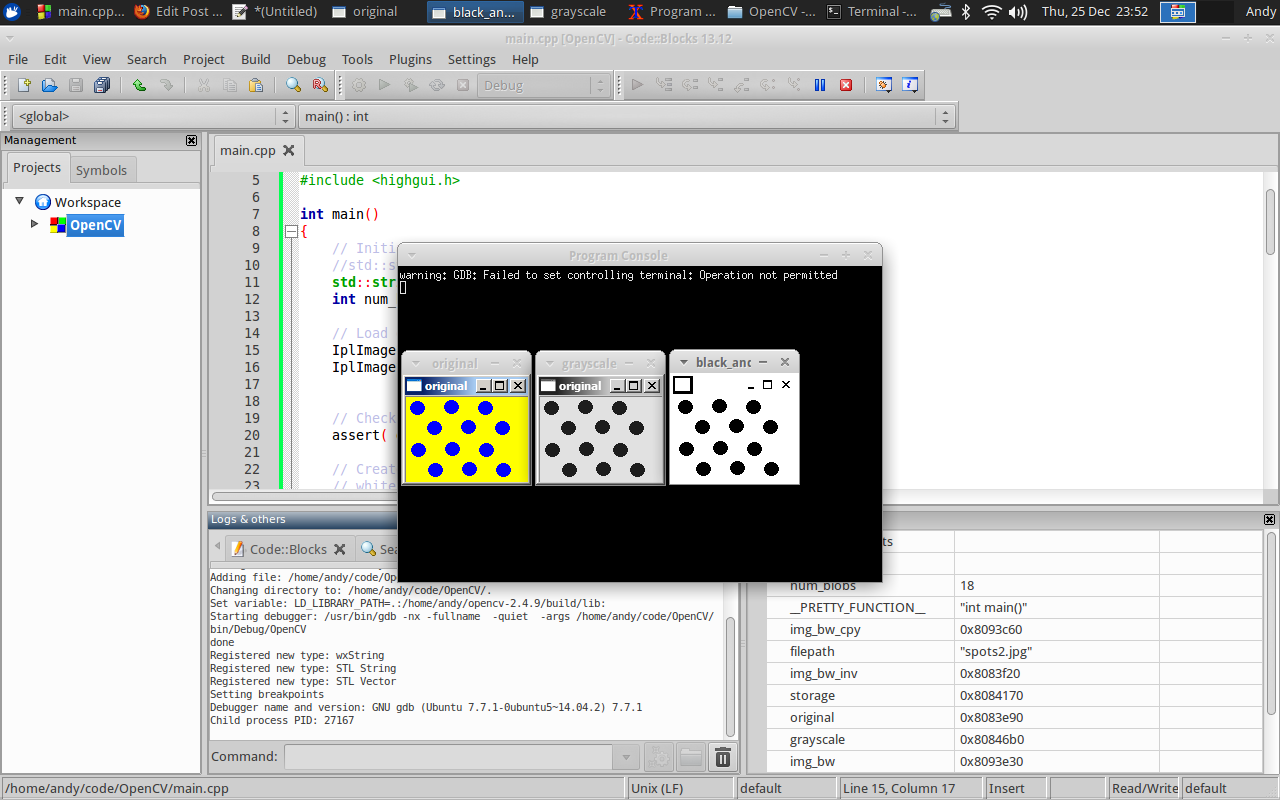
And this screenshot shows the results of running the program, giving us the original colour image, the gray-scale equivalent image and the thresholded black and white image (and hence detect the number of spots in the jpg image):